
























作品詳情
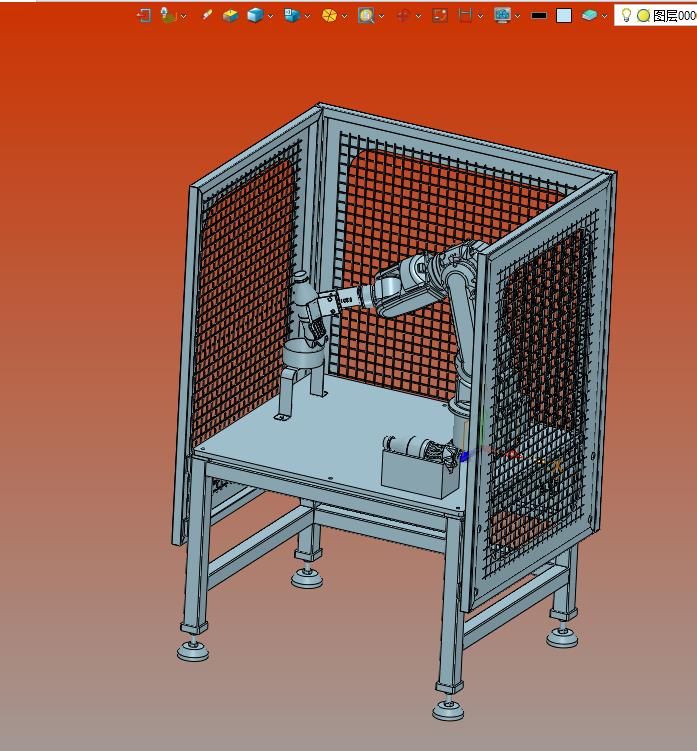
機器人進行可樂瓶與礦泉水瓶的搬運操作,涉及精準(zhǔn)識別、抓取、移動和放置等一系列復(fù)雜動作。機器人通過高精度攝像頭識別目標(biāo)物品,運用機械臂精準(zhǔn)控制技術(shù)和智能算法,實現(xiàn)對不同形狀和重量的可樂瓶、礦泉水瓶的準(zhǔn)確搬運。這一過程融合了機器視覺、機器人動力學(xué)、智能控制等多個領(lǐng)域的技術(shù),確保高效、安全地完成搬運任務(wù)。
全國咨詢熱線: 152 1011 0562 


平diy桌面級快速成型3D打印機")







動臺袋子印畫設(shè)備")







